%200%300%400%Chapter 2Graphical Synthesis of Mechanisms A s s o c . P r o f . Mohamm show annotation
00%125%150%200%300%400%Chapter 2 Graphical Synthesis of Mechanisms A s s o c . P r o f . Mohamm show annotation
ntM D P 2 1 2 Hedaya, M.22.1. Types of Synthesis of Mechanisms ❑ Function generationThe correla show annotation
pes of Synthesis of Mechanisms❑ Function generation The correlation of an input moti show annotation
nd shipboard gun aiming system❑ Path generation The control of a point in the pl show annotation
ya, M.32.1. Types of Synthesis❑ Motion generation The control of a line in the pl show annotation
sition SynthesisHedaya, M.42.2. Extreme positions ❑ 4 bar mechanismM e c h a n i c show annotation
ons2.3.2.2. Three Positions2.3. Synthesis of four-bar mechanism M e c h a n i c s o f M a c show annotation
a n i s m sHedaya, M.92.3.1.1. Rocker-output, equal time for go and return ❑ Angular displacementM e c h a show annotation
Rocker-output, equal time for go and return - Angular Displacement
a n i s m sHedaya, M.122.3.1.1. Rocker-output, equal time for go and return (cont.)❑ Complex motionM e c h show annotation
Rocker-output, equal time for go and return - Complex motion
a n i s m sHedaya, M.162.3.1.2. Rocker-output, quick return ❑ Angular displacementM e c h a show annotation
a n i s m sHedaya, M.192.3.2.1. Coupler-output (two positions) ❑ Complex motionM e c h a n i c show annotation
a n i s m sHedaya, M.222.3.2.2. Coupler-output, three positions ❑ Complex motion (Three Position show annotation
OOQQO1 Q1O2Q2O3Q3OO2OO32.3.2.3. Coupler-output, three positions, predefined ground OO1QQ1Hedaya, M.26 M e c h a n i show annotation
in position 3.Hedaya, M.282.4. Consideration of 4-bar Mechanism Design ❑ Grashof’s Condition should be show annotation
𝒅+𝒂 𝟐𝟐𝒃𝒄Hedaya, M.312.5. Design of Slider-crank Mechanisms ❑ Many applications require a ma show annotation
h a n i s m sHedaya, M.322.5.1. In-Line Slider-Crank Mechanism ❑ Stroke, Δ𝑹𝟒 𝑚𝑎𝑥, is the show annotation
In-Line Slider-Crank Mechanism
Extreme positions coincide on each other similar to Four-bar mechanism
Equal time for go and return
Radius of rank obtained from required stroke
h a n i s m sHedaya, M.332.5.2. Offset Slider-Crank Mechanism ❑ Offset distance, 𝐿1, is the d show annotation
Similar to Four-bar mechanism
Ratio between go and return
Radius of crank obtained from extreme positions
Offset Slider-Crank Mechanism❑ Design of a slider-crank mechanism (Analytically) ➢𝐿1 = 𝐿3 +𝐿2 sin 𝜃−𝛿 , 𝐿2+ show annotation
c h a n i s m sHedaya, M.432.6. Synthesize the crank-shaper mechanism M e c h a n i c s o f M a c show annotation
Synthesis of the crank-shaper mechanism
in the Offset Slider-Crank Mechanism, it was still a Slider-crank mechanism inversion, not the Crank-shaper mechanism inversion
Here, is larger than by only one
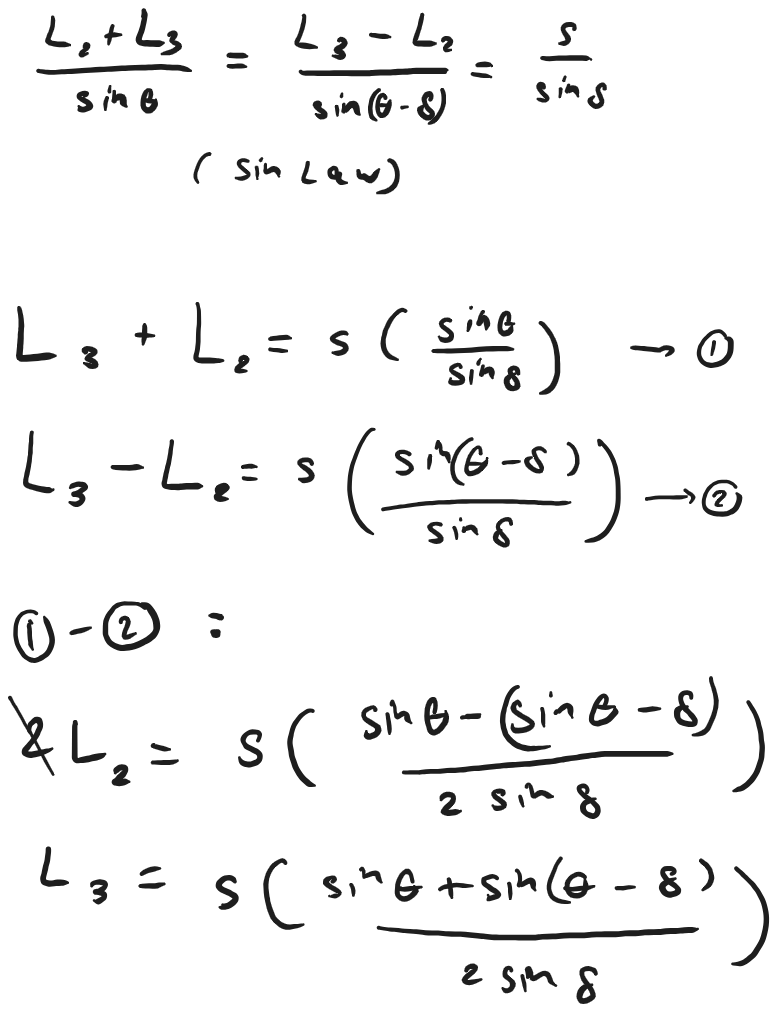
c h a n i s m sHedaya, M.472.7. Analytical procedure to synthesize the crank-shaper mechanism ➢𝐿3 = 𝑆2sin 𝛿2➢𝐿2 =𝐿1sin � show annotation
Analytical procedure to synthesize the crank-shaper mechanism
Offset Slider-Crank Mechanism❑ The stroke of an offset slider-crank mechanism is always greater than twice the crank length ❑ The feasible range for the off show annotation
Why?
er than twice the crank length❑ The feasible range for th e offset distance➢𝐿1 <𝐿3 −𝐿2M show annotation
What is this?