and OR , and are the minimum conditions for a mechanism
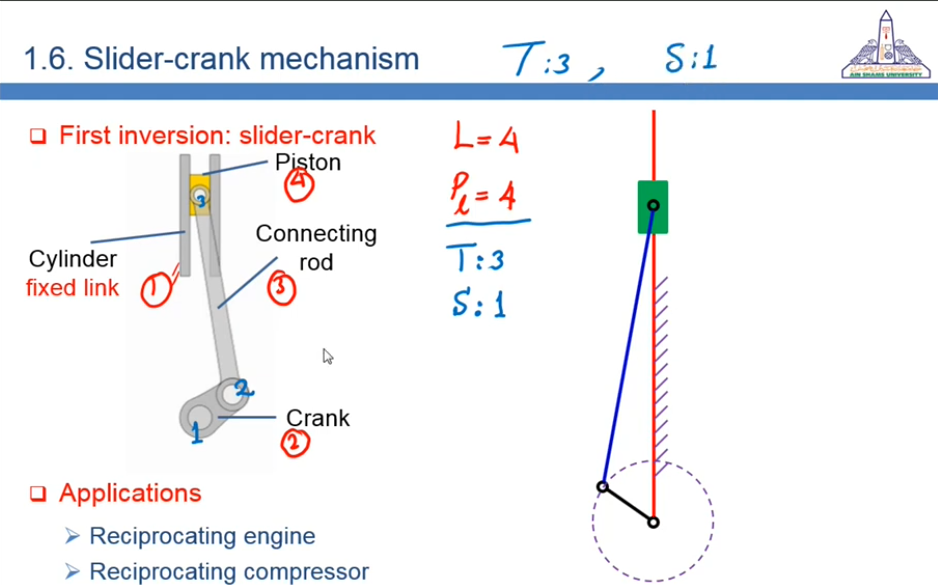
- Converts linear motion of piston to rotational motion at crank (reciprocating engine) or vise versa (reciprocating compressor)
- Rotational motion is more favorable to deal with due to its continuous nature Kinematic Diagram vs. Construction Drawing
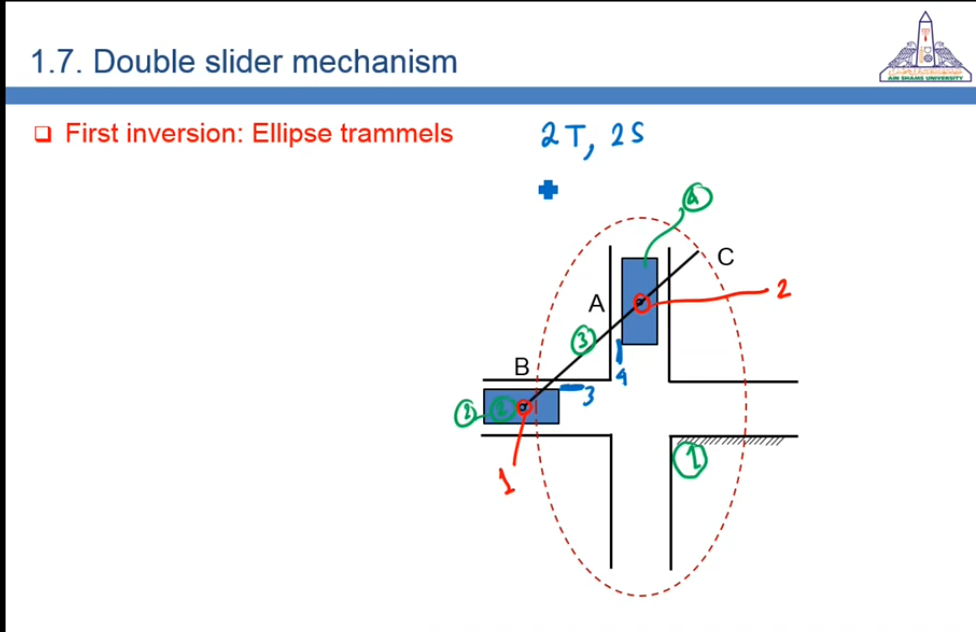
- A Mechanism is characterized by the number of pairs and number of links
- Inversion of a Mechanism involves implementing changes in the mechanism (i.e. changing the fixed link) to get a different variation of the mechanism, without changing the number of links or pairs
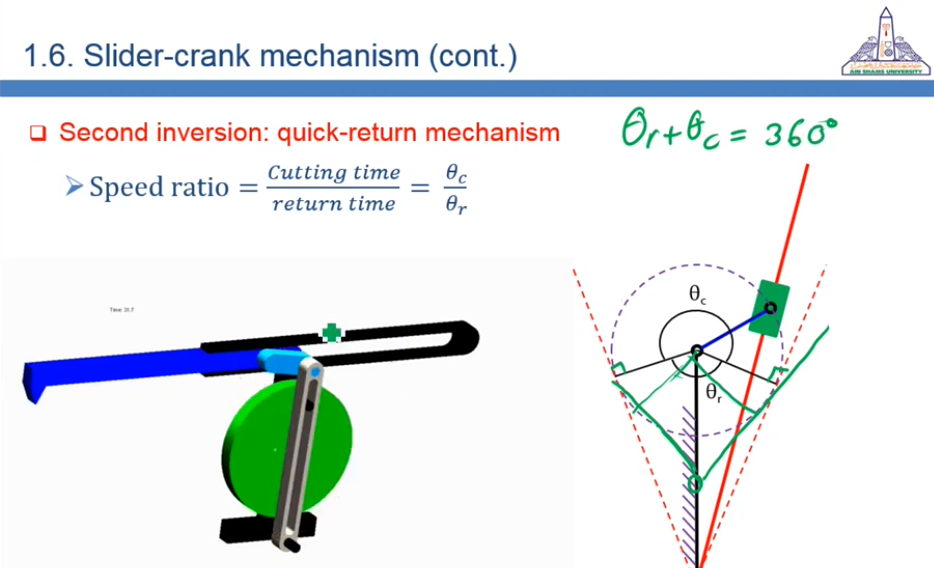
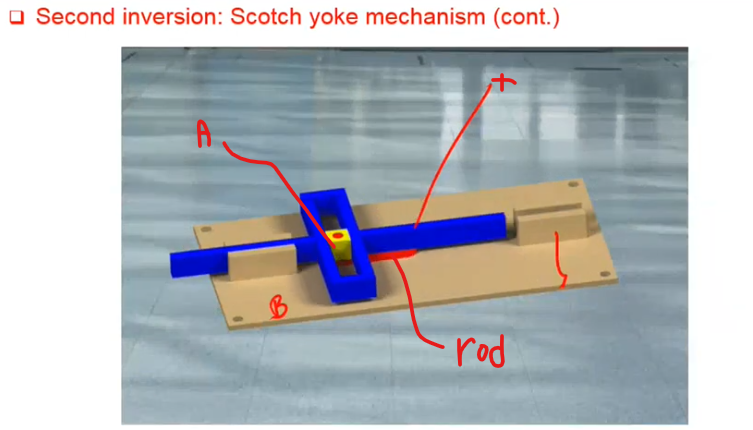
- Converts rotational motion to oscillatory motion
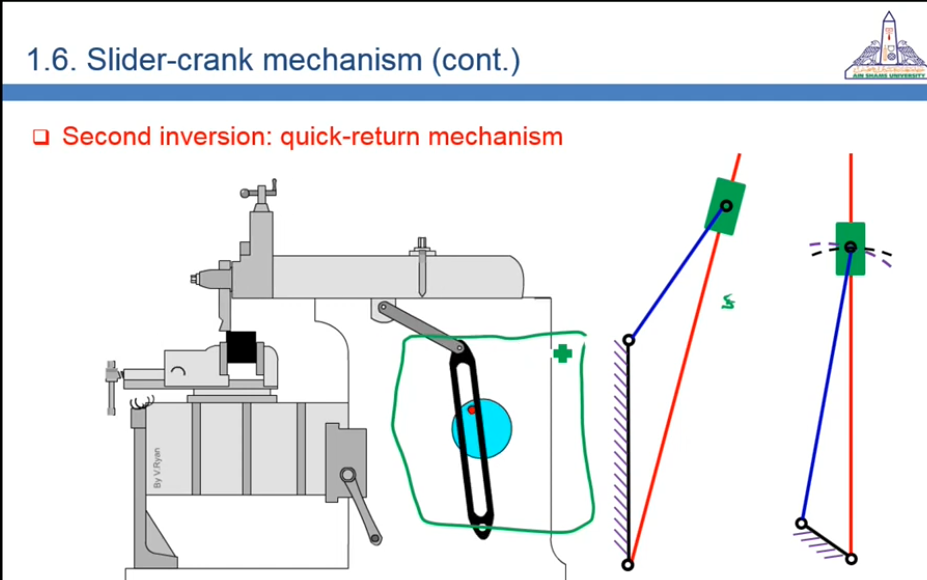
- Achieves quick-return behavior
This is not the only mechanism to achieve the quick return behavior, but that’s what it is famous for
This inversion of the Slider-crank mechanism is called Crank-shaper mechanism
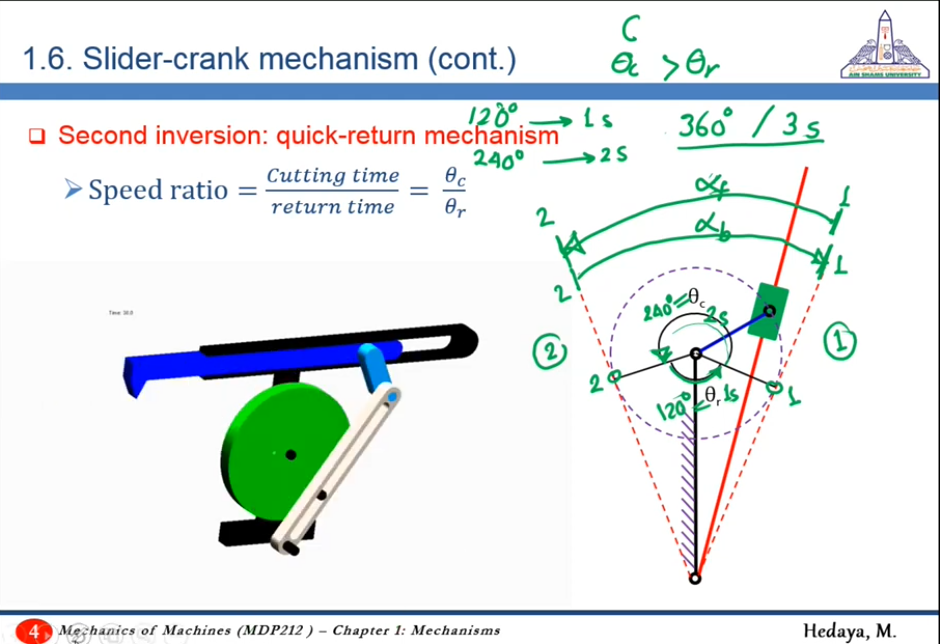
Extreme positions are tangent to the circle of the connecting rod (which behaves as a crank)
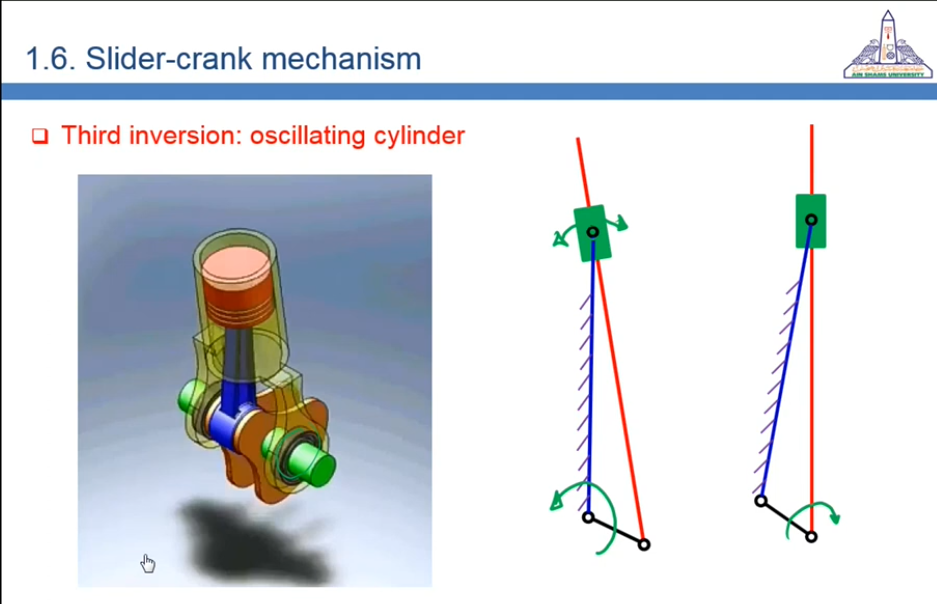
- The oscillation of the cylinder, which has large inertial, causes unbalance and dynamic forces, thus its usage has declined
01:24:53 Usually the number of inversions in a mechanism equals the number of links, but some inversions are not logical and are not considered (e.g. fixing piston in Slider-crank mechanism)
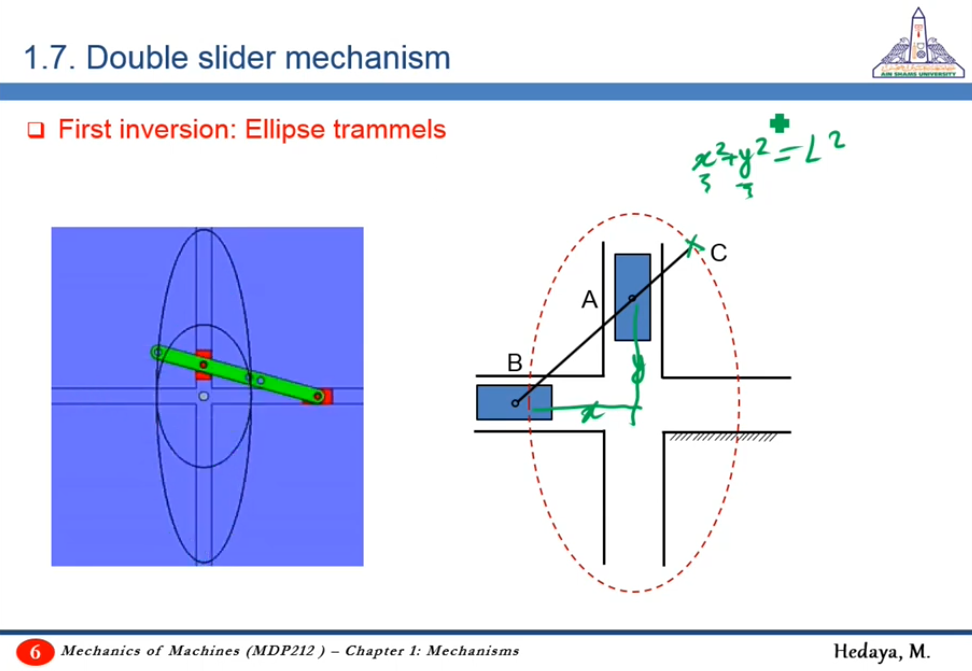
- Achieves ellipse equation by relating , and using the fact that
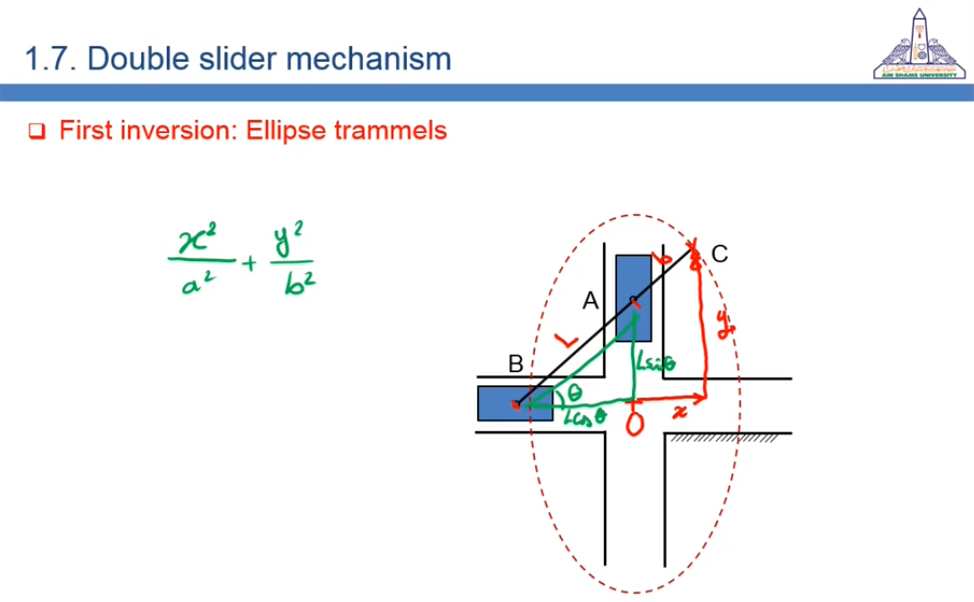
This mechanism is a great example of how mechanisms are used for satisfying mathematical equations (which is then applied in mechanical computers)
- Any mechanism is characterized by inputs and outputs in terms of mathematical relations
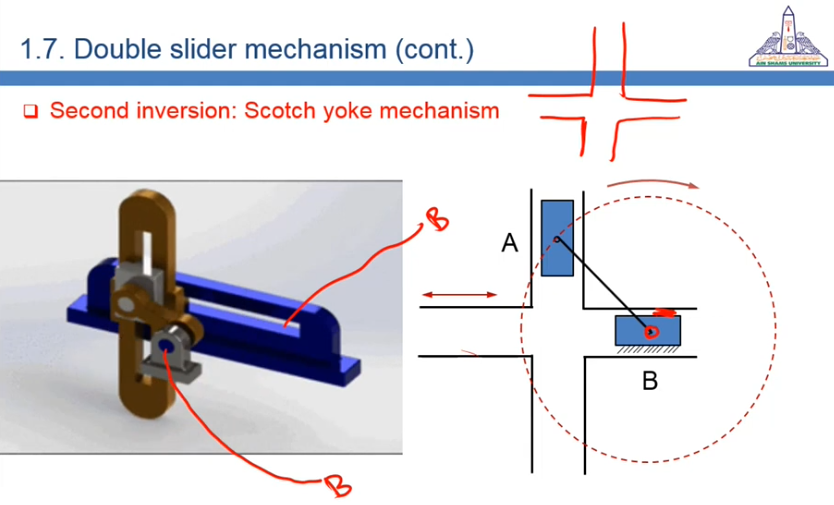
Represents harmonic motion
Gives a relation between input angle (rotational motion) and translation distance (reciprocating motion)
There are three Types of motion
Pay attention to the relation between Kinematic diagram and Construction drawing
Fixing link A will not give a new inversion because it will be the same as fixing B only giving vertically reciprocating Scotch yoke mechanism
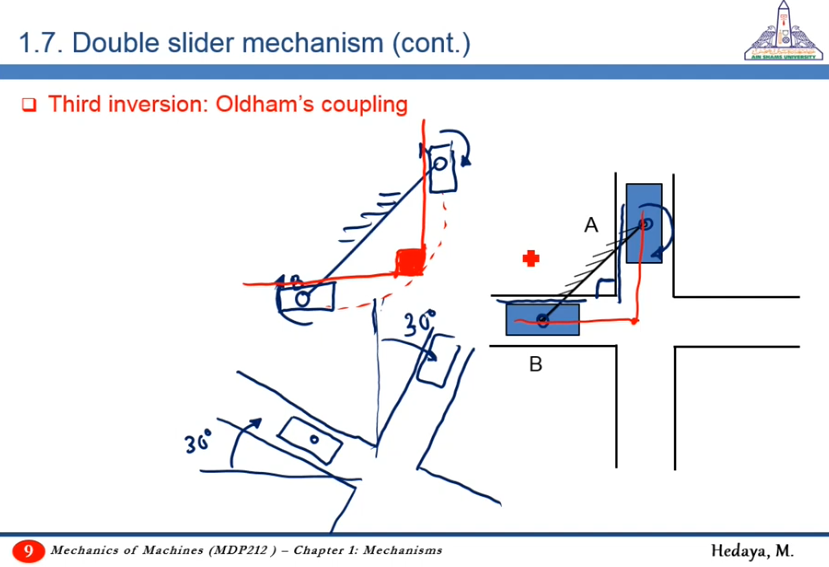
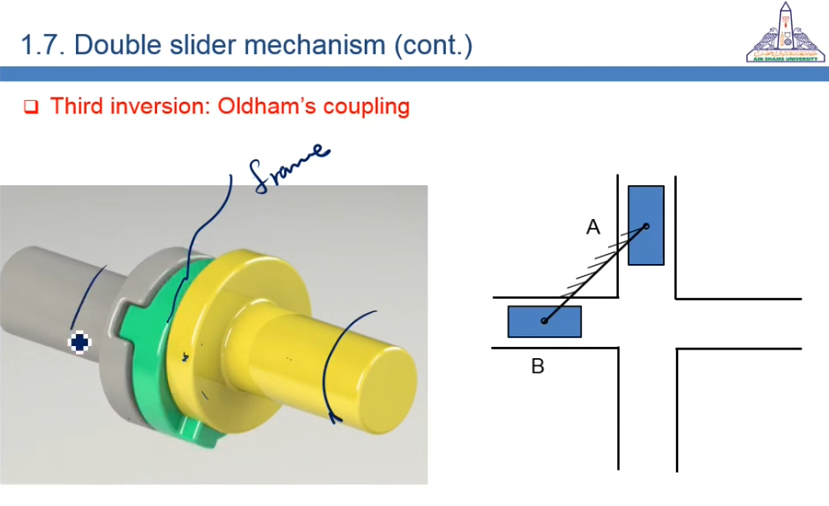
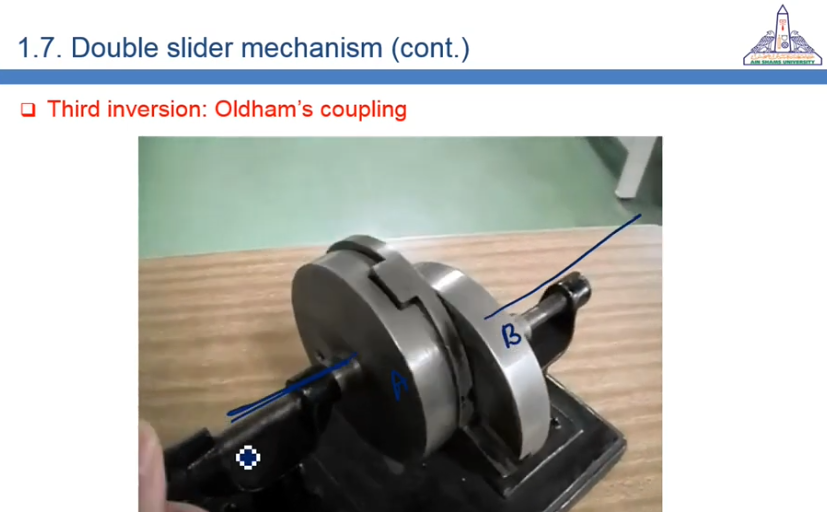
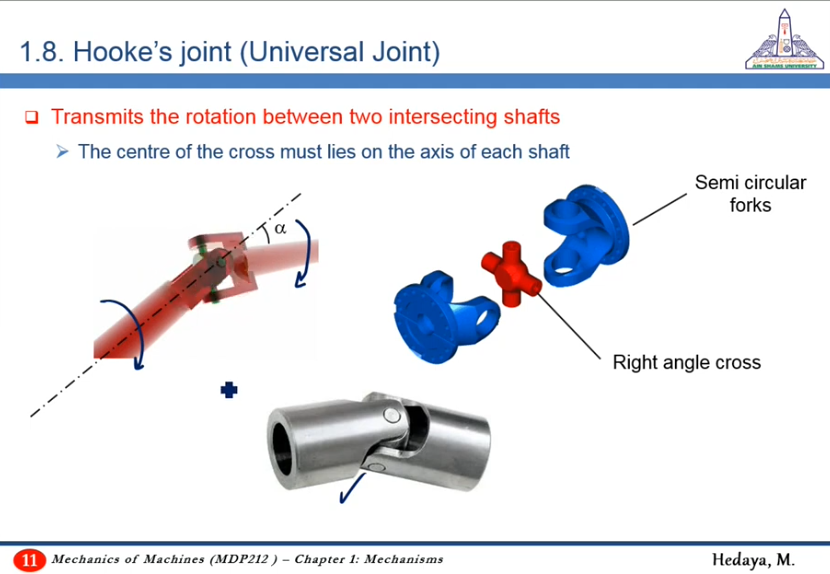
- Rotation at A → Rotation of Frame → Rotation at B ⇒ Coupling of shafts with parallel, shifted axes
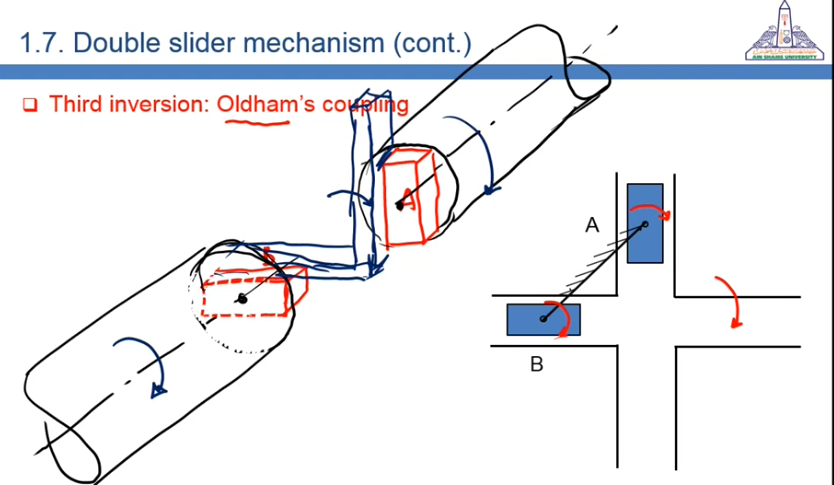
- There is a shift between axis of rotation of A and axis of rotation of B
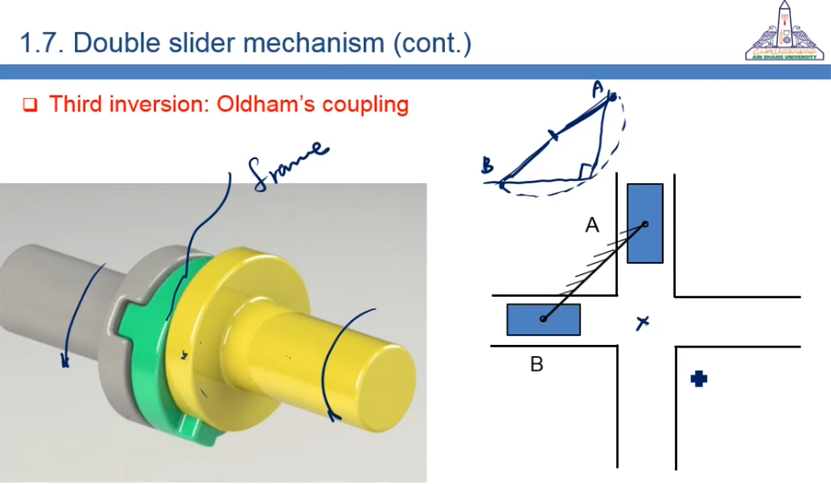
- Base is link AB
Maintaining 90 degree angle
- To maintain 90 degree between A and B, the frame’s center need to rotate about a point that lies at the center between AB
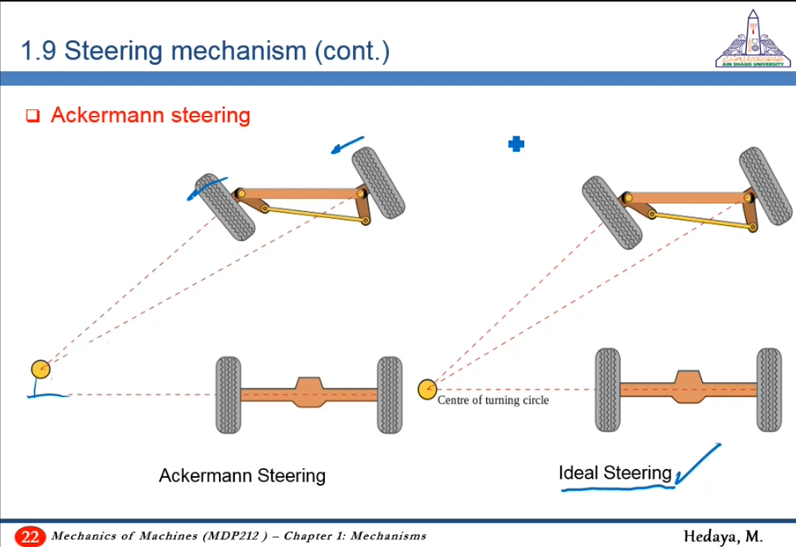
- Approximates the Condition of ideal steering