Rigid Motions
- Rigid motions is all about describing things with respect to each other.
- It is about describing things (points and vectors) in a frame (e.g. ) with respect to a reference frame (e.g. ).
- The first step is representing the target frame with respect to the reference frame (devising a relationship between the two frames)
- If we have this relationship, we can represent any point in the target frame with respect to the reference frame
- These types of relationships are called Coordinate Transformations (as in transforming the coordinates of one frame to the coordinates of another frame, seeing how something in the target frame can be described with respect to the reference frame)
- There are a lot of transformations
- Rotation
- Translation
- Reflection
- Scaling
- Shear
- For robotics, rotation and translation are the most important transformations
Rotation
Describing the rotation of a point to another frame with respect to an original frame is just projecting this point on the axes of the original frame (unit vector of the original frame)
Questions
Parameterization
vs.
Homogenous Transformation
Homogenous Coordinates
Link to original
- Quick Understanding of Homogeneous Coordinates for Computer Graphics - YouTube
- Homogeneous Coordinates: The 4D Hack for 3D Animations
General Remarks
- Coordinate vector vs. Free vector in space
- Rotation of frames (frames that are not parallel) makes the difference between coordinate vector and free vector. This demands the description of rotation between the frames
- Sequence of rotation, axis of rotation
- Current frame → post multiply | base frame → pre multiply
- Parameterization
- Euler angles (ZYZ)
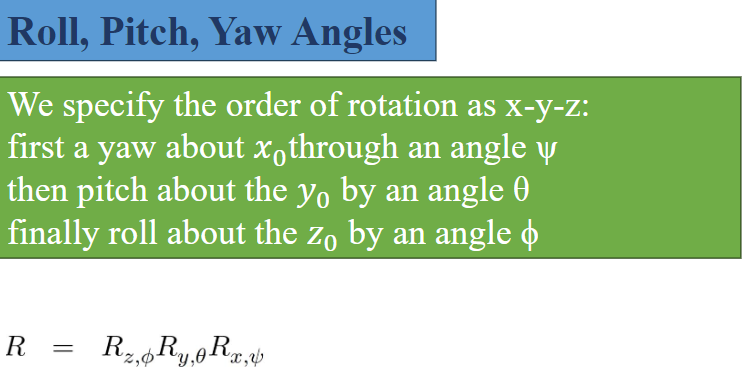
- yaw, pitch, roll
- Homogenous transformation matrix