What are these systems?
- For a given magnitude response, there exists multiple transfer functions that can produce that same magnitude response exactly.
- However, those transfer functions would produce different phase responses (by adding more phase delay to the inputs)
- There is only one minimum phase system for a given magnitude response, but there are an infinite amount of non-minimum phase systems that have the same magnitude response but add different amounts of phase delays
- The system whose phase response is the minimum for a given magnitude response is called the minimum phase system (that is like saying: this is the system that can produce this magnitude response with the minimum amount of phase delay added to the inputs)
- Other systems are called non-minimum phase systems
How do these other systems manage to produce the same magnitude response with different phase responses?
-
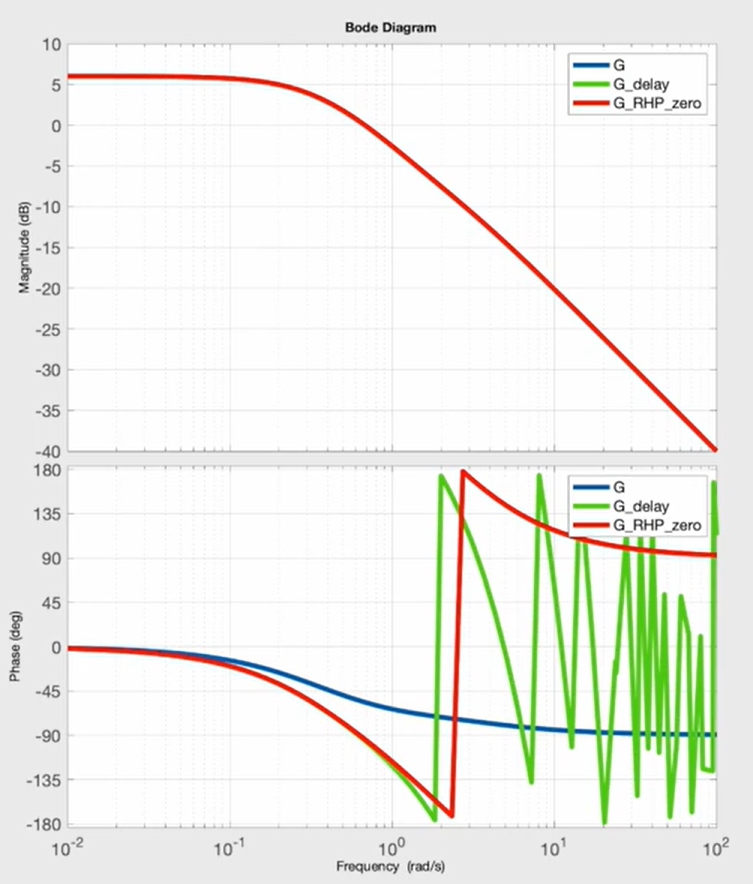
Adding a pure time delay: magnitude response is affected by steady state value. If a system has an added extra pure time delay, its magnitude response will not change, but its phase response will be changed (phase delay increases)
- The bad thing about pure time delay or transport lag is that it phase delay increases with frequency and approaches as
-
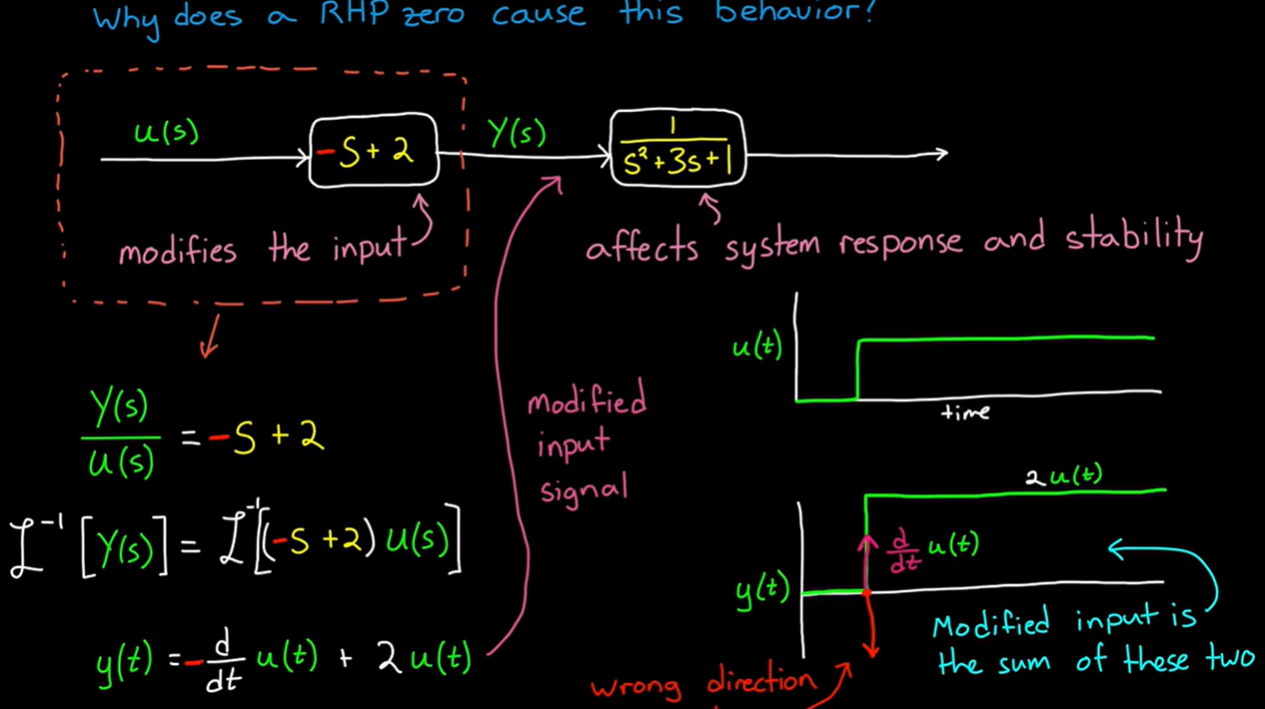
Moving one or more zeros to the RHP: RHP zeros means negative . A negative is like a negative derivative. This negative derivative “fights” the input signal by trying to go to the other direction. This “fight” adds a delay to the system
- Systems with RHP initially respond opposite to the input signal then correct themselves to arrive at the desired value at steady state (see the resources below for examples)